Az elektromos járművek elektromos vezérlésének lényege a motorvezérlés.Ebben a cikkben az iparban általánosan használt csillag-delta indítás elvét használják az elektromos járművek vezérlésének optimalizálására, így a 48 V-os elektromos hajtásrendszer a 10-72 kW-os motorhajtás fő formájává válhat.A teljes jármű teljesítménye garantált, ugyanakkor a kisautók és miniautók elektromos meghajtási költsége jelentősen csökken,

A legutóbbi tanulmányban rájöttem, hogy az elektromos járművek vezérlése valójában a motor vezérlése.Mivel a cikkben szereplő ismeretek nagyon széleskörűek és részletesek, ha a motorvezérlési séma optimalizálásának alapelve és folyamata részletesen le van írva, a szerző által jelenleg olvasott tankönyvek szerint a tudáspontok elegendőek egy monográfia elkészítéséhez. több mint 100 oldallal és több mint 100 000 szóval.Annak érdekében, hogy az olvasók a saját médián megértsék és elsajátítsák egy ilyen optimalizálási módszert több ezer szó tartományán belül.Ez a cikk konkrét példákon keresztül írja le az elektromos járművek motorrendszerének optimalizálási folyamatát.
Az itt leírt példák a Baojun E100, BAIC EC3 és BYD E2 szabványokon alapulnak.A két modellnek csak a következő paramétereit kell összekapcsolni, és csak a motorvezérlés optimalizálva 48V/144V DC kettős feszültségű akkumulátorrendszerré, AC 33V/99V kettős feszültségű motorrá és motormeghajtókká .Közülük a motor meghajtó teljesítményelektronikus rendszere a kulcsa az egész optimalizálási sémának, amelyet a szerző alaposan és mélyen tanulmányoz.
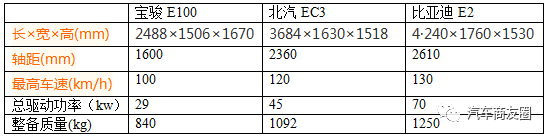
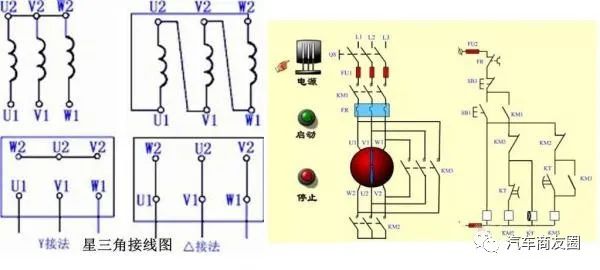
Más szóval, a Baojun E100, BAIC EC3 és BYD E2 motorjait csak 29-70 kW-os motorvezérlő rendszerre kell optimalizálni.Ezek az A00-as kisautó, az A0-s kisautó és az A kompakt tisztán elektromos autó képviselői.Ez a cikk az ipari háromfázisú aszinkron motorvezérlési módszert fogja alkalmazni az elektromos járművek motorjainak csillag-delta, V/F+DTC háromfázisú aszinkron aszinkron motorvezérléssel történő vezérlésére.
A térbeli korlátok miatt ez a cikk nem magyarázza el a csillagháromszög alapelveit és így tovább.Kezdjük az ipari motorvezérlés általános motorteljesítményével.Az általánosan használt 380V-os háromfázisú aszinkron motor 0,18-315KW, a kis teljesítmény Y csatlakozás, a közepes teljesítmény △ csatlakozás, a nagy teljesítmény pedig 380/660V motor.Általában a 660 V-os motorok a fő motorok 300 kW felett.Nem arról van szó, hogy a 300KW feletti motorok nem tudnak 380V-ot használni, hanem a gazdaságosságuk nem jó.Ez az áram korlátozza a motor és a vezérlőáramkör gazdaságosságát.Általában 1 négyzetmilliméter átengedi a 6A áramot.A háromfázisú aszinkron indukciós motor tervezése után meg kell határozni a motor tekercskábelét.Vagyis az áthaladó áramot meghatározzák.Az ipari motorok szempontjából az 500A a legnagyobb érték a gazdaságában.
Visszatérve az elektromos jármű motorjára, a 48 V-os akkumulátorrendszer PWM háromfázisú feszültsége 33 V.Ha egy ipari motor gazdaságos árama 500 A, akkor egy 48 V-os elektromos jármű maximális gazdaságossági értéke körülbelül 27 KW háromfázisú indukciós motor esetén.Ugyanakkor a jármű dinamikus jellemzőit figyelembe véve a maximális áramerősség eléréséhez szükséges idő nagyon rövid, általában nem haladja meg a néhány percet, vagyis 27 kW-ot lehet túlterhelési állapotba hozni.Általában a túlterhelés 2-3-szorosa a normál állapotnak.Vagyis a normál üzemállapot 9 ~ 13,5KW.
Ha csak a feszültségszint és az áramkapacitás illeszkedését nézzük.A 48V-os rendszer csak 30KW-on belül lehet, mivel a vezetési hatásfok a legjobb üzemállapot.
A háromfázisú aszinkron motorokhoz azonban számos szabályozási módszer létezik.Az elektromos járművek széles sebesség-szabályozási (majdnem 0-100%) és nyomatékszabályozási tartományban (majdnem 0-100%) rendelkeznek.Kemény üzemi körülmények között az elektromos járművek jelenleg főként VF vagy DTC vezérlést használnak.Ha csillag-delta szabályozás kerül bevezetésre, az váratlan hatást válthat ki.
Az ipari szabályozásban a csillag-delta vezérlőfeszültség 1,732-szeres, ami inkább véletlen, mint elv.A 48 V-os rendszer nem fokozza a PWM frekvenciamodulációt, hogy AC 33 V legyen, és az ipari motor feszültségszintjének megfelelően tervezett motor 57 V.De a csillag-delta vezérlőfeszültség szintjét 3-szorosra állítjuk, ami a 9 gyöke.Akkor 99V lenne.
Vagyis ha a motort 99V AC háromfázisú aszinkron motornak tervezték delta csatlakozással és 33V Y csatlakozással, akkor a motor fordulatszáma 0 és 100% között állítható a 20 és 72 KW közötti teljesítménytartományban gazdaságos szinten. körülmények.Általában a motor maximális fordulatszáma 12000 RPM, a nyomatékszabályozás 0-100%, a frekvenciamoduláció 0-400 Hz.
Ha egy ilyen optimalizálási séma megvalósítható, akkor az A-osztályú autók és a miniautók egy motoron keresztül jó teljesítményt érhetnek el.Tudjuk, hogy egy 48 V-os motorrendszer költsége (a 30 kW-os csúcsértéken belül) körülbelül 5000 jüan.A jelen cikkben szereplő optimalizálási séma költsége nem ismert, de nem ad hozzá anyagokat, csak megváltoztatja a szabályozási módszert és kettős feszültségszintet vezet be.Költségnövekedése is kontrollálható.
Természetesen sok új probléma lesz egy ilyen szabályozási rendszerben.A legnagyobb probléma a motor kialakítása, a meghajtó kialakítása, valamint a nagyfeszültségű akkumulátorcsomag töltési és kisütési jellemzőivel szemben támasztott igen magas követelmények.Ezek a problémák ellenőrizhetők, és léteznek megoldások.Például a motor tervezése megoldható a magas és alacsony feszültségszintek arányának beállításával.A következő cikkben közösen megvitatjuk.
Feladás időpontja: 2023.02.02